Differentiable Physical Modeling for Parameter Estimation
Physical Modeling Sound Synthesis
- Synthesized samples (Smith 1992)
![]()
![]()
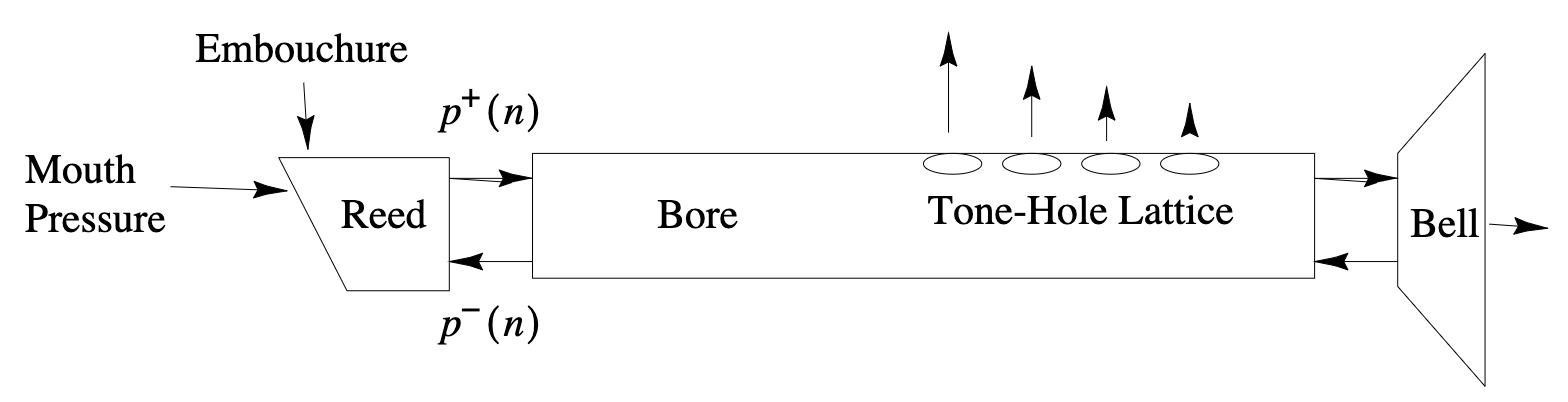
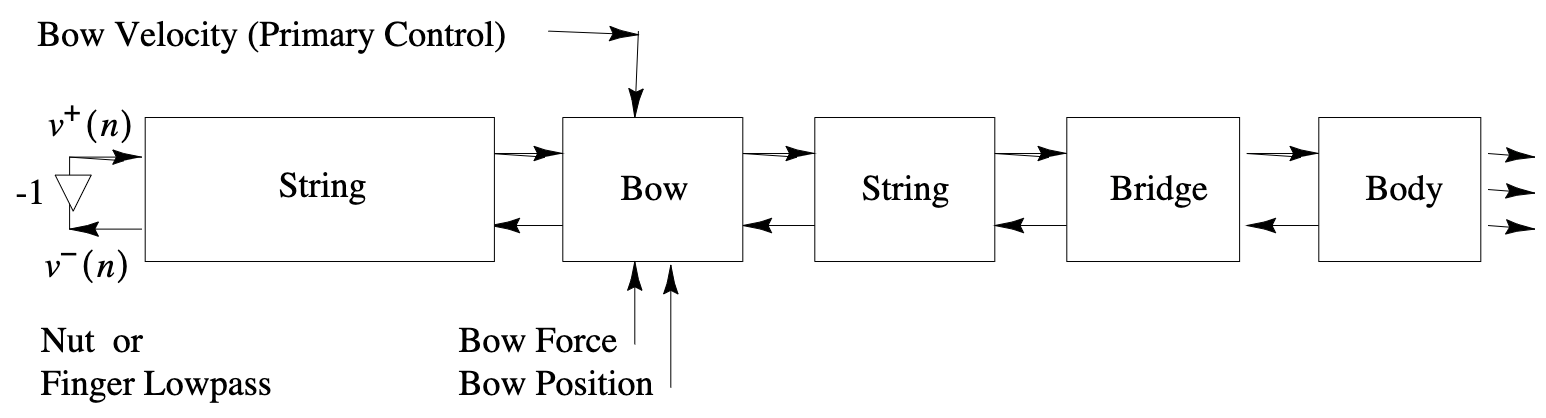
Sound examples from https://ccrma.stanford.edu/
~jos/waveguide/Sound_Examples.html
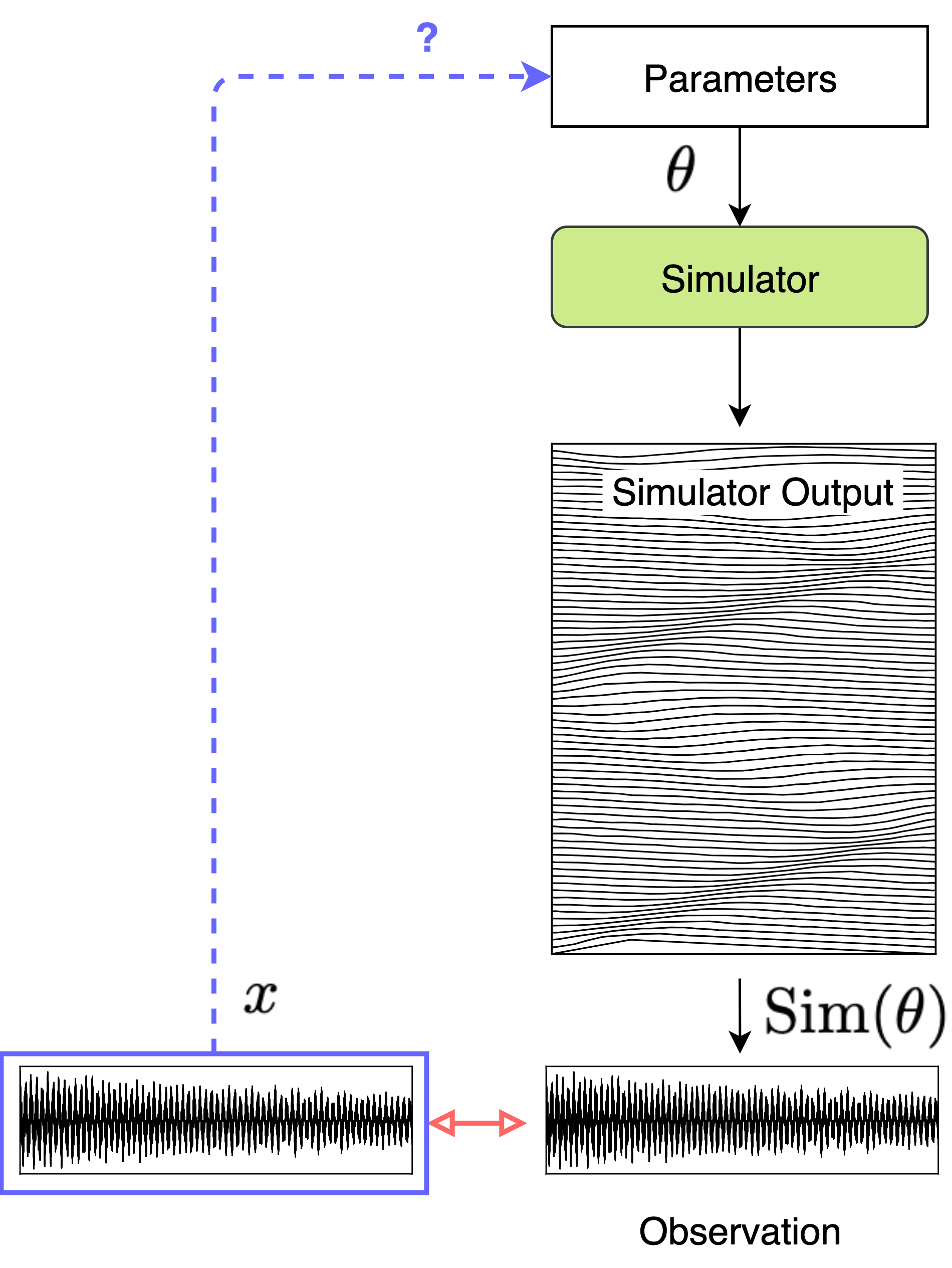
The inverse problem
- Objective:
- given a known observation (target sound)
- find the simulator’s input parameters
- that can closely resemble the target sound.
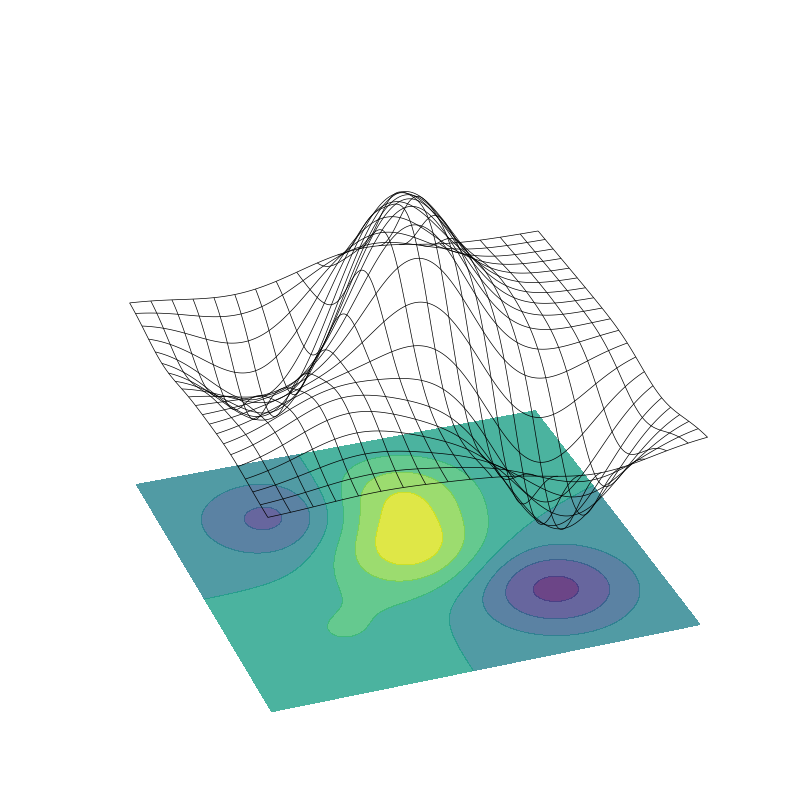
The parameter estimation
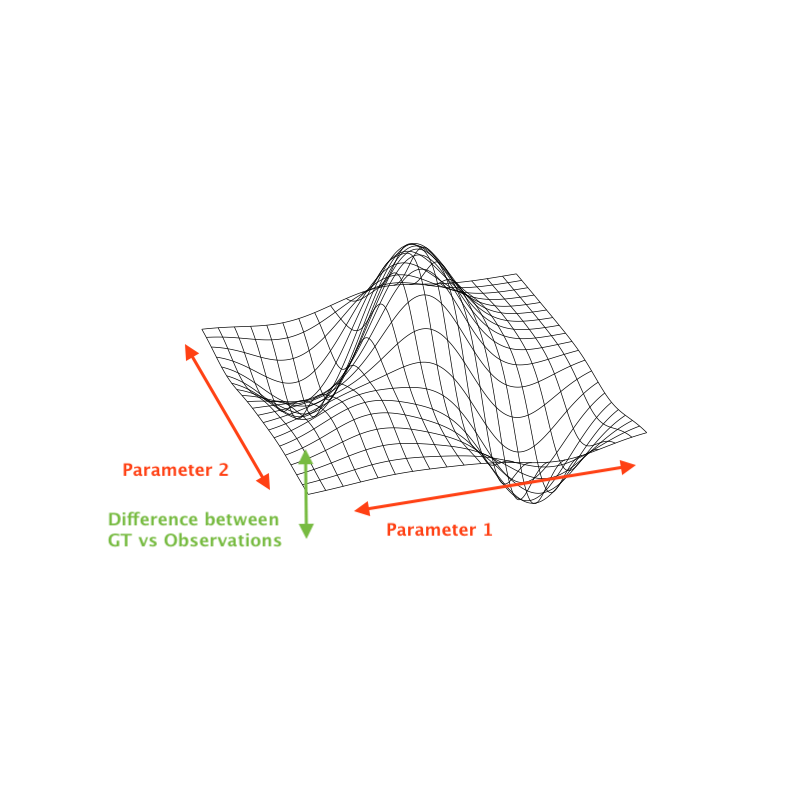
- Point estimation
- To find the exact parameter “data point”
- cf. frequentist interpretation
![]()
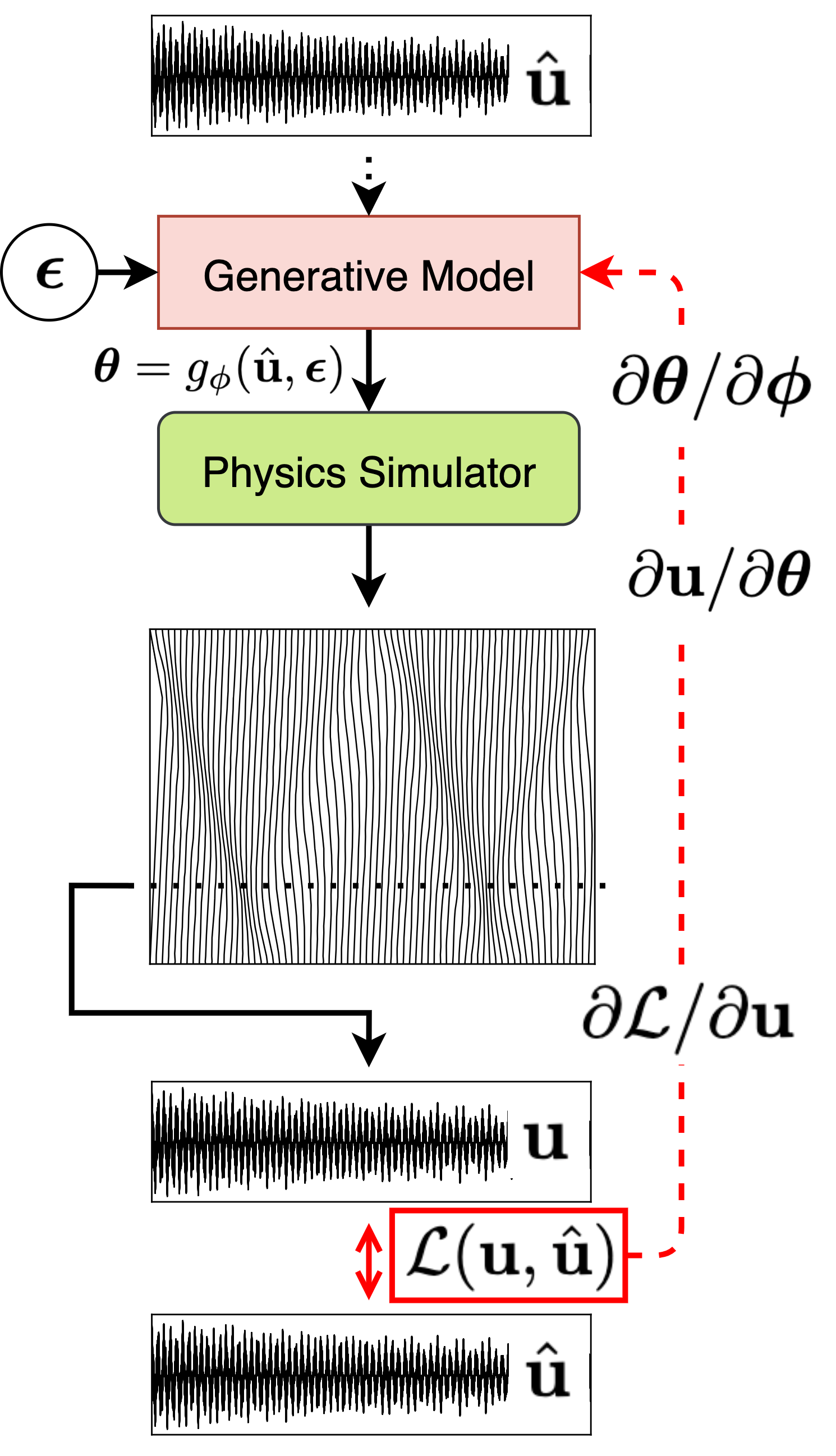
- Distribution estimation
- To find a generator that can draw parameter “set”
- cf. Bayesian interpretation
![]()
FDTD Example (1D Wave Equation) \(x_F\)
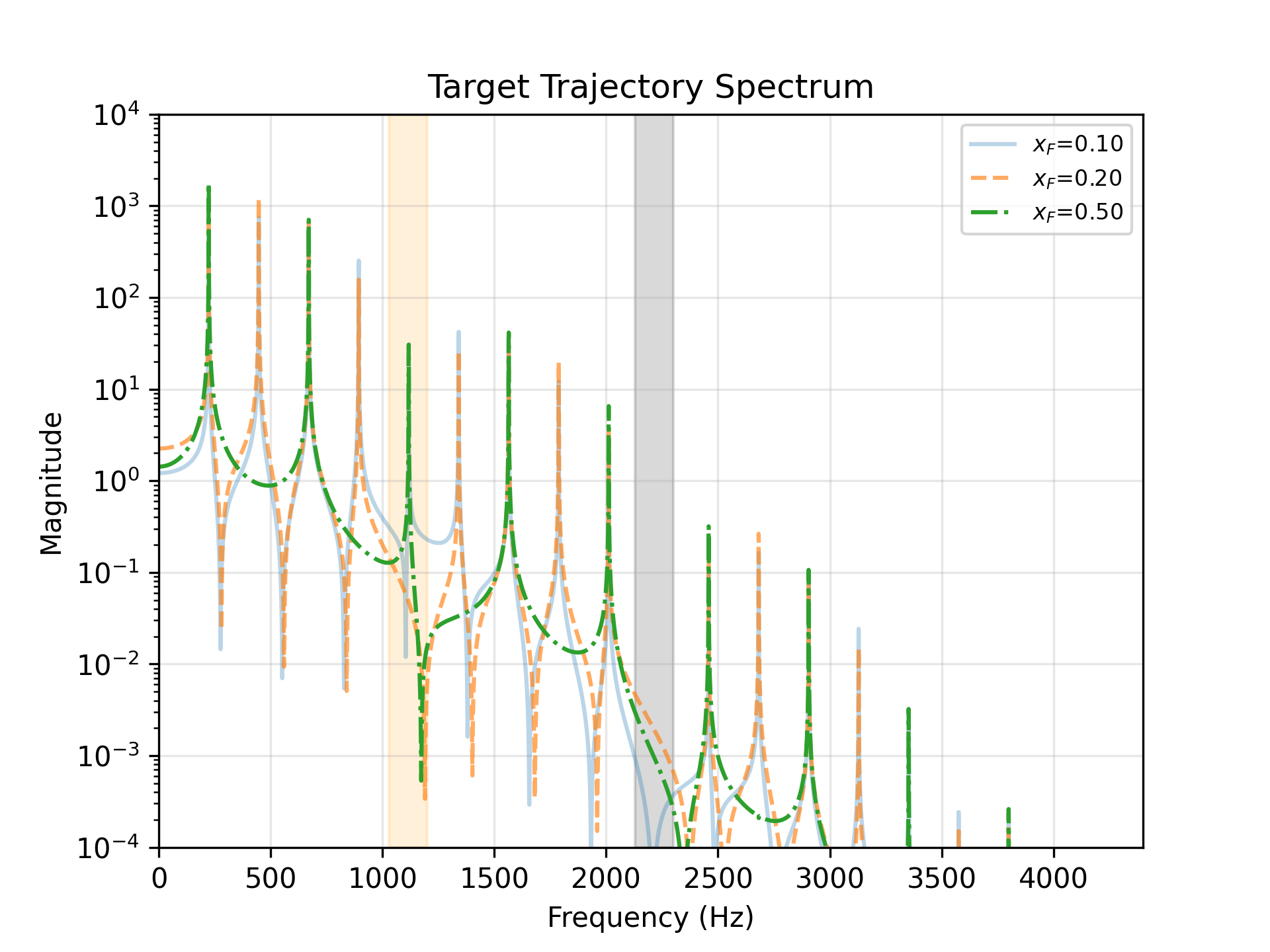
Spectrum of the string with \(F_0=220\) Hz, output picked up at \(x=0.5\)
Forcing location \(x_F\)
- \(x_F=0.1\)
Missing \(10 n\times F_0\) - \(x_F=0.2\)
Missing \(5 n\times F_0\) - \(x_F=0.5\)
Missing \(2 n\times F_0\)
FDTD Example (1D Wave Equation) \(t_F\)
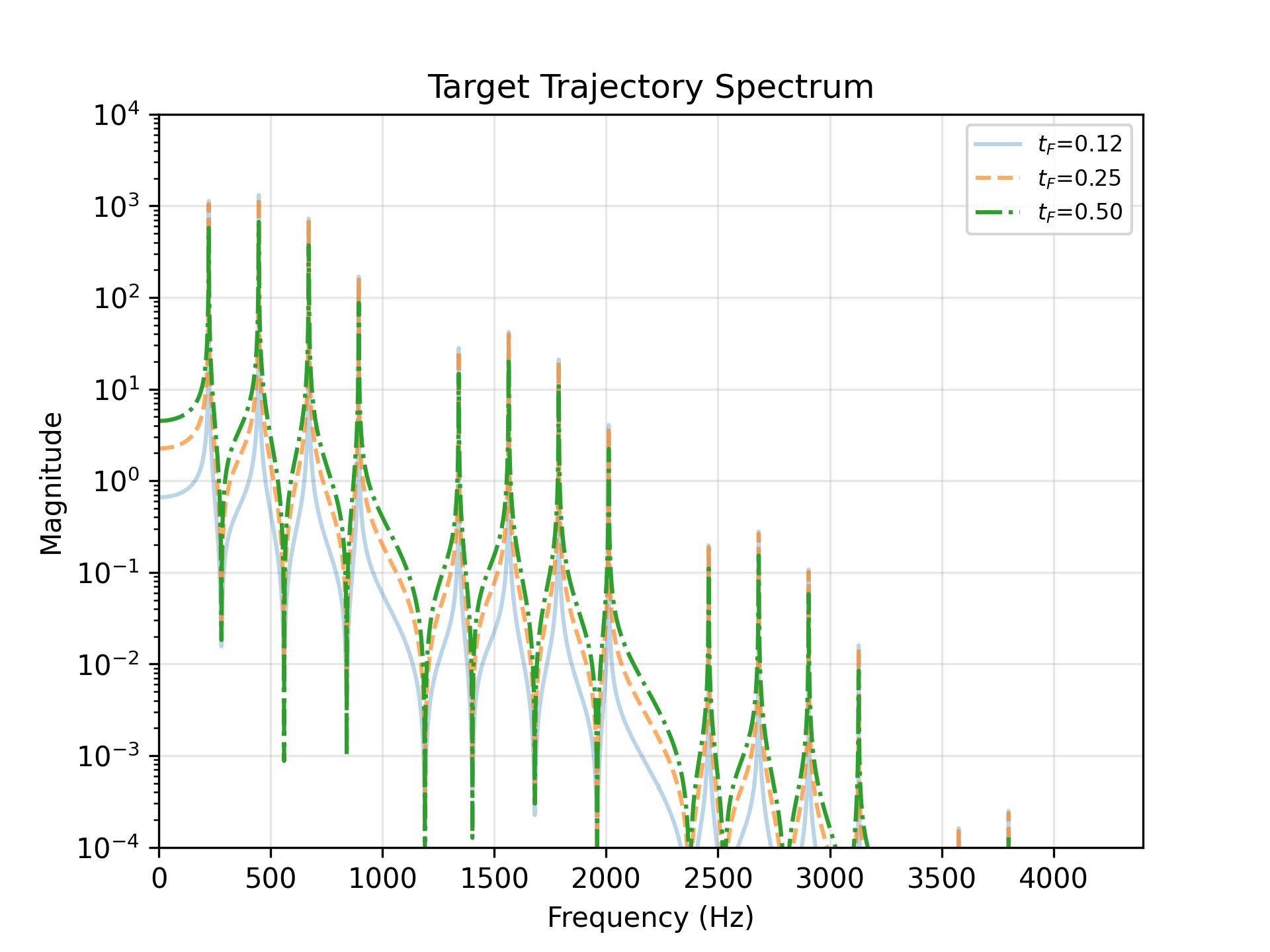
Forcing onset time \(t_F\)
- \(t_F=0.12\)
- \(t_F=0.25\)
- \(t_F=0.50\)
FDTD Example (1D Wave Equation) \(\tau\)
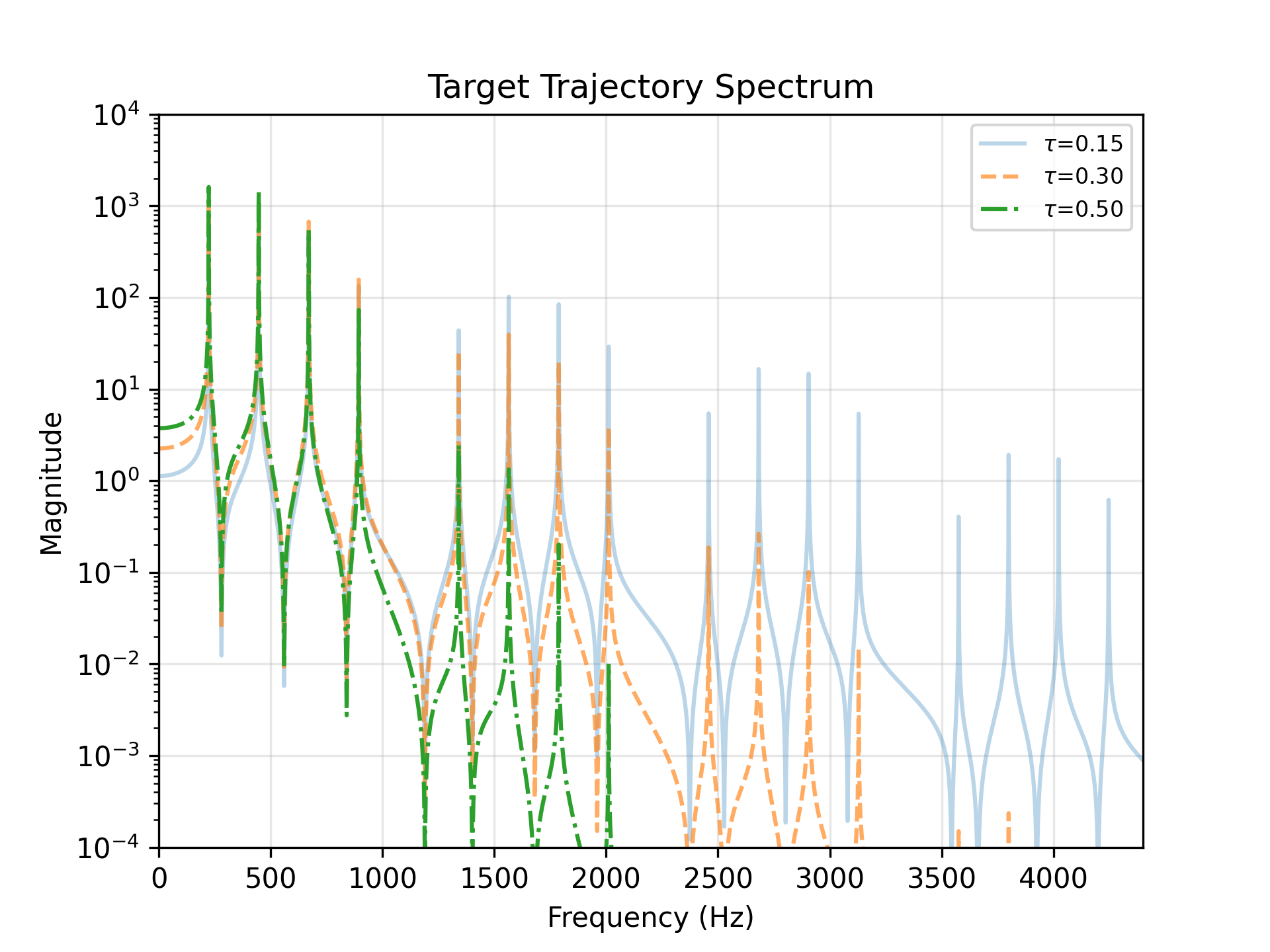
Forcing duration \(\tau\)
- \(\tau=0.15\)
- \(\tau=0.30\)
- \(\tau=0.50\)
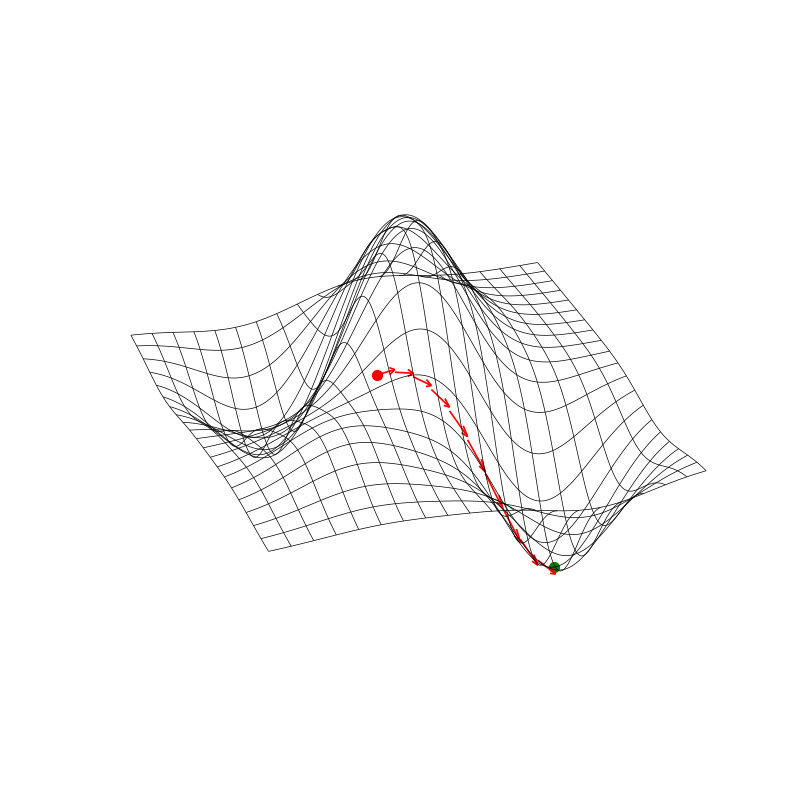
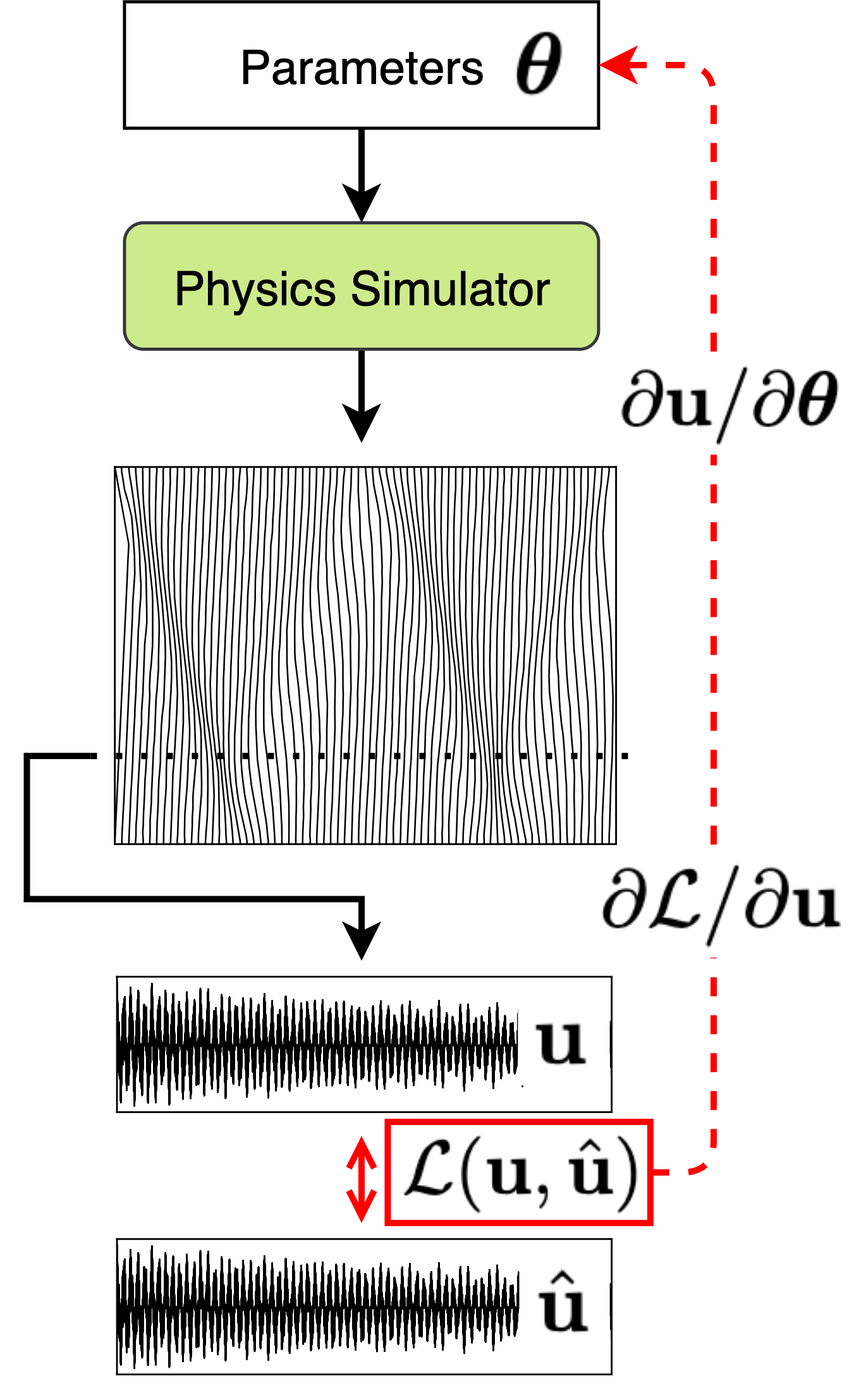
Point Estimation using Diff. FDTD
- Given:
- Target observation \(\mathbf{\hat{u}} \in \mathbb{R}^{N_t}\)
- Differentiable simulator (e.g., FDTD simulation)
- excitation parameterized by \(\boldsymbol{\theta} = [x_F, t_F, \tau]\) where \(f_\tau(t - t_F) = \exp\!\left( - \frac{(t - t_F)^2}{2\tau^2} \right)\)
- \(\boldsymbol{\theta}\) randomly initialized in a reasonable range
- Objective:
Find the optimal parameter \(\boldsymbol{\theta}^*\)
\[ \boldsymbol{\theta}^* = \arg\min_{\boldsymbol{\theta}} \left\|\mathbf{u}(\boldsymbol{\theta}) - \mathbf{\hat{u}}\right\| \]
that can reproduce the target observation.
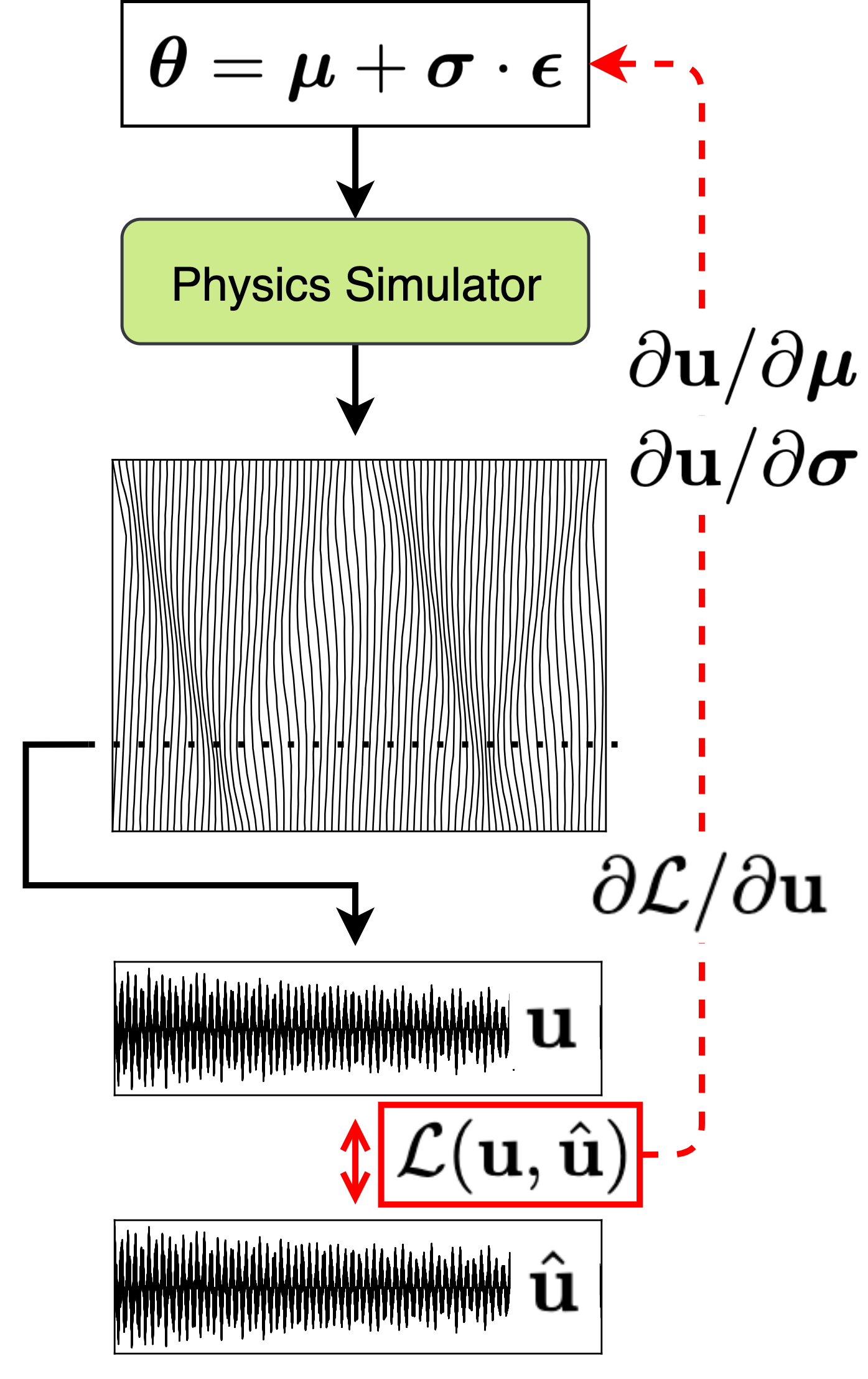
Distribution Estimation using Diff. FDTD
- Given:
- Target observation \(\mathbf{\hat{u}} \in \mathbb{R}^{N_t}\)
- Differentiable simulator (e.g., FDTD simulation)
- Same excitation parametes \(\boldsymbol{\theta} = [x_F, t_F, \tau]\)
- But sampled from a certain distribution
- Objective:
Find the optimal \(\phi^*\) that \(\boldsymbol{\theta}\sim\boldsymbol{q}_{\phi^*}\)
\[ \phi^* = \arg\min_{\boldsymbol{\phi}} \mathbb{E}_{\theta\sim\boldsymbol{q}_{\phi}}\left\|\mathbf{u}(\boldsymbol{\theta}) - \mathbf{\hat{u}}\right\| \]
\(q_\phi\): parameter sampler (distribution generator)
Reparameterize \(\boldsymbol\theta=\boldsymbol\mu + \boldsymbol\sigma\cdot\boldsymbol\epsilon\) where \(\boldsymbol\epsilon\sim N(\mathbf{0}, \mathbf{I})\)
Distribution Estimation: Moving forward
- Being able to compute \(\nabla_\theta \log p(u|\theta)\) can imply many
applicability in Bayesian methods- Markov Chain Monte Carlo (MCMC)
- Hamiltonian Monte Carlo (HMC)
- Sequential Monte Carlo (SMC)
- Utilizing real-measured \(\theta\)
- Securing a good initialization (critical!)
Link to the Codes
- Scan the QR code
- Or, access the same link by typing:
https://bit.ly/ismir-pm-pt4-notebook
- You can also find the same link by doing:
- type
https://ismir-physical-modeling.github.io/in your browser, - scroll down to Schedule,
- locate to current section (Differentiable … Parameter Estimation),
- click
</> Notebook.
- type